 used as a constraint on the state s in some of the tests.
This formula is a conjunction of literals, which must be true in this state.
used as a constraint on the state s in some of the tests.
This formula is a conjunction of literals, which must be true in this state.
 and the state s'.
and the state s'.
AD-query is a Perl script that converts the action description written in a fragment of an action language C into a DLP program, runs the DLP solver DLV and parses its output to give answers to certain questions about the action description.
The questions that can be answered range from whether are certain queries violated, if the queries are contradictory themselves to getting exact answer to which states and transitions violate certain queries and how can this be amended.
A formal description of the tests performed can be found in the paper "Eiter et al. - Resolving conflicts in action descriptions." (ECAI-06). The implementation and examples are available as .tar.gz package for download in the files directory. You can also download singular files from the respective subdirectories within.
Recently a methodology for error classification in action descriptions using AD-query tests has been proposed in "Eiter et al. - Error Classification in Action Descriptions: A Heuristic Approach." (AAAI-08, in press). The data (domain descriptions and queries) used for its experimental evaluation is also available for download as a .tar.gz package: experiments.tar.gz.
This work is part of the project "Answer Set Programming for Reactive Planning and Execution Monitoring"
AD-query can be invoked in the following way:
ad-query -TEST FILE1 FILE2 ... FILEn| TEST |
This switch specifies the test to perform. To run test T3, use switch -T3.
Currently we support tests D1..D4 and T1..T4:
| ||||||||||||||||
| FILEx | File which contains the description of rules, fluents, queries, actions or constraints. Any number of files can be used, and they are treated as one big file. |
and
) you can use the respective keywords in the input file.
| action literal [requires condition]. | Every action literal has to be properly declared before its use. We can declare one literal on one line. The condition enables us to add type information, for example: action move(X) requires box(X). |
| fluent literal [requires condition]. | Similarily every fluent has to be defined. |
| caused [-]literal [if ifpart] [after afterpart] [requires condition]. | This is used to describe a static or dynamic causal law. Static laws have empty afterparts. Condition enables us again to use variables in rules, e.g.: caused -light(B) after break(B),light(B) requires bulb(B). |
| inertial [-]literal. | This is a shortcut for an inertial rule of a single literal. |
| possibly [-]literal[ after afterpart] [if ifpart]. | This is used to describe a possibility query. |
| neccessarily [-]literal[ after afterpart] [if ifpart]. | And similarily for a neccessity query. |
| initial [-]literal, ..., [-]literal. |
This is used to describe a formula used as a constraint on the state s in some of the tests.
This formula is a conjunction of literals, which must be true in this state.
|
| successor [-]literal, ..., [-]literal. |
And the equivalent for and the state s'.
|

To describe the lightbulb example for our tool, we have to specify input file as following:
To declare fluents and actions:
fluent light.
fluent broken.
action toggle.
Then to describe causal laws (1) and (2):
caused light after toggle, -light.
caused -light if broken.
And to describe inertial rule (3):
inertial light.
inertial -light.
inertial broken.
inertial -broken.
Then to specify the query we're running we have to add respective line:
possibly -light after toggle if broken.
necessarily -light after toggle if light.
As some of the tests require that only one query is present in the input file, we will divide this description into three files bulb.in,
bulb.pos and bulb.nec, where the .in file will contain all rules except last two, and the .pos and .nec files will contain the respective queries.
You can find these three files in the examples archive along with the another example.
We're going to model the action of cheating, where the position of ball after cheat can be anywhere. We will define position(X) for numbers 1,2,3, describing the valid positions of the ball, and a single fluent at(X) which describes where the ball is. A single action used is cheat. The rules used are following:
inertial at(X), -at(X).
caused at(X) if at(X) after cheat.
caused -at(X) if at(Y) after cheat, X!=Y.
Please note, that in this description, the ball cannot disappear from the table.
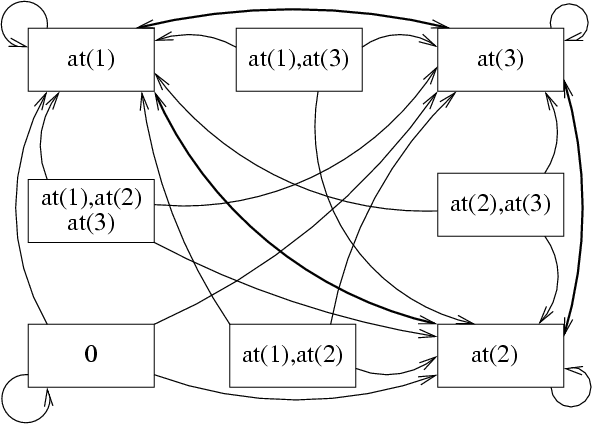
Each state can lead into a three different states: {at(1)},{at(2)},{at(3)}, except for
a state {} which can lead to itself.
This example is described in file game.in also with a single possibility query which says that state {} is possible after executing action cheat.
For sake of a consistency check, we have added 2 new fluents to the domain -- legal which indicates that the current situation if consistent, and above(B,L) which is a transitive closure of on(B,L). Furthermore we added a nop action that does nothing.
Consistency checking is a bit problematic in C language, as we have to consider any initial state for the transitions. This means, that even our auxiliary fluents used for consistency checking can be guessed to be either true or false. In our implementation we're checking for consistency in these steps:
home> ./ad-query -T1 bulb.in bulb.pos Test T1. Which states of T(D) violate q? INITIAL STATE: broken. -light.This acknowledges that this query is violated at a certain state. Then she checks the necessity query by test T2:
home> ./ad-query -T2 bulb.in bulb.nec Test T2. Which transitions of T(D) violate q? INITIAL STATE: -broken. light. SUCCESSOR STATE: -broken. light.Also necessity query is broken by certain transition. She wonders whether the queries are contradictory (and no action description would satisfy both), and checks this by test D1:
home> ./ad-query -D1 bulb.in bulb.nec bulb.pos Test D1. Is the set of queries Q contradictory relative to D? The set of queries is not contradictory.That's good, the description can be repaired somehow. An important question is whether just adding new rules is needed - for this she can use the test D4:
home> ./ad-query -D4 bulb.in bulb.nec bulb.pos Test D4. Do we have to modify a set of dynamic causal laws D to resolve a conflict between D and Q? The conflict cannot be resolved without modifying D, due to these queries: Possibility query q2 is contradictory with the rest at state: broken. -light.So she needs to remove some of the existing rules. She wants to check whether the inertia rules can be kept intact - by using test D3 with modified domain description containing only inertia rules. This domain description will be stored in file bulb-rules.in:
home> ./ad-query -D3 bulb-rules.in bulb.nec bulb.pos Test D3. Can we resolve a conflict between D and Q, without modifying a set of causal laws D? The conflict between D and Q can be resolved without modifying D.That's a good sign. Now she knows she needs to modify the causal law for sure, and does not have to modify inertia. To get some ideas for repair, she might check if the possibility query is violated due to underspecification by test T4:
home> ./ad-query -T4 bulb.in bulb.pos Test T4. Which underspecified transitions are there for states that violate query q? INITIAL STATE: broken. -light. SUCCESSOR STATE: -broken. -light. UNDERSPECIFIED ATOMS: -broken.This information means she can add rule `caused -broken if -broken,-light after broken,-light' and the query wouldn't be violated anymore. Then she might check which causal rules are in conflict with necessity query using test D2:
home> ./ad-query -D2 bulb.in bulb.nec Test D2. If D does not satisfy a particular necessity query q in Q, which dynamic causal laws in D violate q? LAWS: i1. i4.This information means that by removing inertia rules #1 and #4, the query would be satisfied. However this is not a solution the designer is looking for, therefore she has to think about a different solutions.
By using all tests, the designer found out which states and transitions are violating queries, got some information about what needs to be modified and also received some suggestions for these repairs. How to actually repair the description, is up to her.
Created and maintained by Jan Senko